In den Foren gibt es öfter Diskussionen, wie man die Qualität insbesondere von gelaserten Bildern verbessern kann. Viele User haben Probleme mit sog. Banding und Skipping, also sichtbaren Linien im Bild. Meistens lassen sich diese auf falsch eingestellte Mechanik (siehe hier) und falsche Bild-Laser-Einstellungen (siehe hier) zurückführen. Wenn man das alles erledigt hat, kann man noch ein letztes Quäntchen an Qualität herausholen, in dem man die Stepper-Motoren und die Ritzel ersetzt. Dadurch wird die Bewegung des Lasers optimiert. Allerdings wird der Laser (zumindest bei 8Bit-Boards) nicht mehr die Spitzengeschwindigkeiten wie vorher erreichen, da mehr Rechenpower nötig ist. Aber dafür ist das Bild noch ein kleines bisschen besser. Das gilt allerdings nur für Materialien, bei denen man hohe Auflösungen auch erkennen kann, wie Fliesen oder Metalle. Bei Holz wird man das eher weniger merken.
Grundlagen
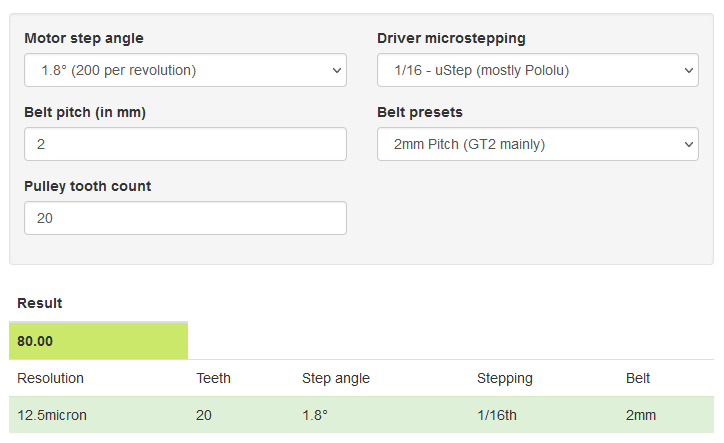
Als Grundlage hier noch ein kurzer Abriss zu den Schrittmotoren. Die heißen eben so, da sie in einzelnen Schritten gesteuert werden. Die meisten Schrittmotoren haben einen Schrittwinkel von 1,8°. Das bedeutet, 200 Schritte ergeben eine komplette Umdrehung. Die Motoren werden von Schrittmotor-Treibern angesteuert. Diese können die einzelnen Schritte des Motors durch die Ansteuerung der Spulen noch mal in 16 Mikroschritte (Standard Polulu-Treiber) unterteilen. Damit ergeben sich 3.200 Schritte für eine volle Umdrehung. Wenn eine Standard-Riemenscheibe mit 20 Zähnen und ein Standard-Riemen (GT2) mit 2 mm Steigung genutzt werden, ergibt sich eine Schrittweite von 0,0125 mm (12,5 µm oder 80 Steps / mm). [Siehe Berechnungen unten]
Firmware-Setting:
$100 = 80
$101 = 80Der Laser hat eine Fokus-Größe von 0,08 mm. Im optimalen Fall wollen wir ein Bild also mit einem Linienabstand von 0,08 mm (=318DPI) lasern. Wenn man nun diese 0,08 mm durch die 0,0125 mm Schrittweite teilt, bekommt man 6,4 Schritte als Ergebnis heraus. Das heißt, die Motoren sind gar nicht in der Lage, exakt diese 0,08 mm Linienbreite umzusetzen. Das führt dazu, dass entweder Linien verloren gehen oder verdoppelt werden müssen, um die gewünschte Vorgabe in der Software zu erreichen. Durch eine Änderung der Motoren und / oder der Übersetzung lässt sich das aber ändern.
Kleine Ergänzung: Man kann den Zeilenabstand natürlich auch ändern, z. B. auf 0,075, was sehr nahe an der Fokusgröße liegt und zu vollen Schritten führt. Außerdem ist die Fokusgröße nie perfekt 0,08 (da gehe ich ganz stark von aus), so dass man höchstwahrscheinlich keinen Qualitätsunterschied bemerken wird. Wenn man die Auflösung noch weiter erhöhen möchte, einfach weiter lesen.
Änderung der Riemenscheiben
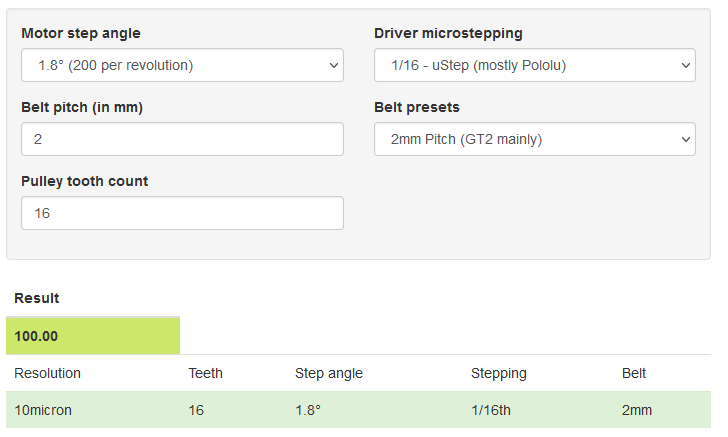
Wenn man jedoch statt der Riemenscheiben mit 20 Zähnen eine Riemenscheibe mit 16 Zähnen einsetzt, ergibt sich nach obiger Rechnung eine Schrittweite von 0,010 mm (10 µm oder 100 Steps / mm). Damit lassen sich nun auch die 0,08 mm Zeilenweite exakt erreichen (8 Schritte).
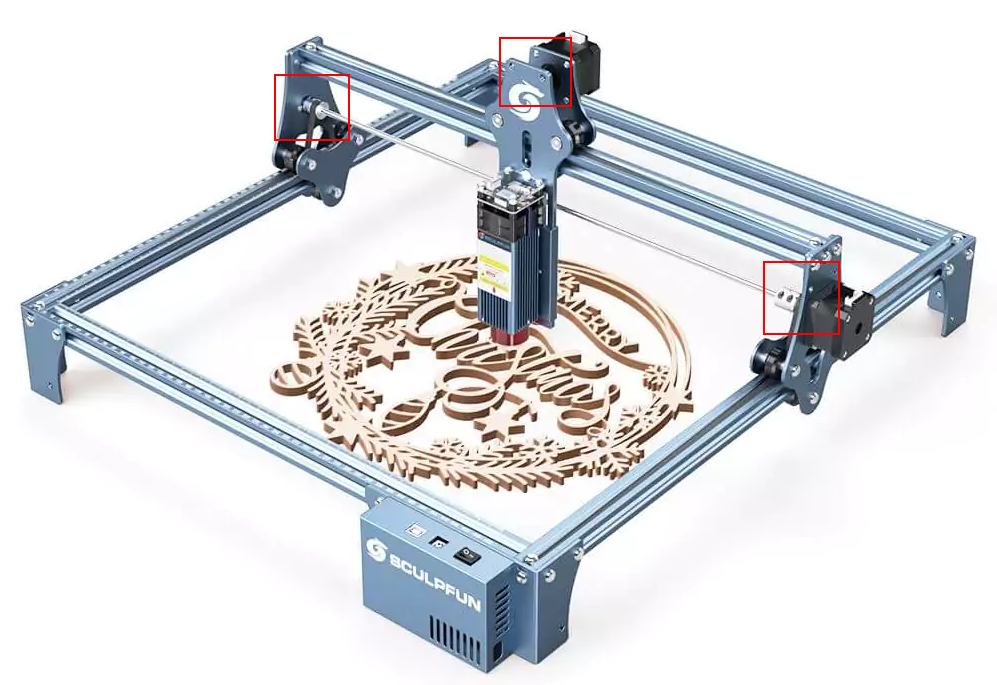
Es sind drei Riemenscheiben nötig, zwei an der y-Achse, eine an der x-Achse. 16 Zähne, Innendurchmesser 5 mm, Riemenbreite 6 mm, solche wie diese hier: AliExpress-Link.
Firmware-Setting nach Änderung:
$100 = 100
$101 = 100
Änderung der Motoren
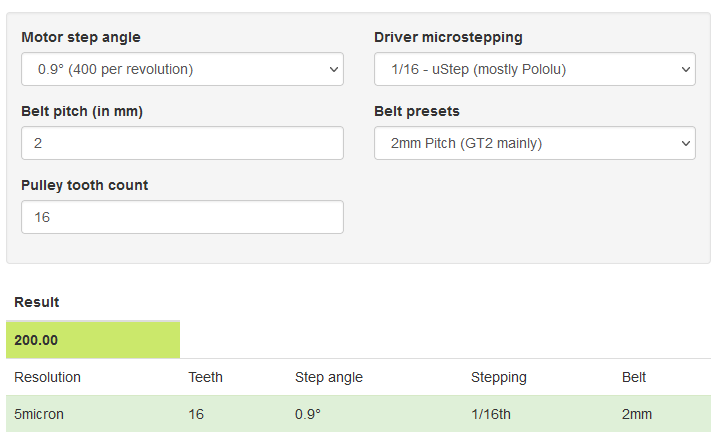
Wenn man das ganze dann noch etwas weiter treiben will, kann man auch noch die Motoren durch Schrittmotoren mit 0,9° Schrittweite ersetzen. Das verdoppelt die Genauigkeit noch einmal. Damit ergibt sich eine Schrittweite von 0,005 mm oder 5 µm (200 Steps / mm). Auch damit lassen sich die 0,08 mm erreichen (16 Schritte).
Firmware-Setting nach Änderung:
$100 = 200
$101 = 200Da hier dann aber statt der ursprünglichen 80 Schritte pro Millimeter jetzt 200 Schritte ausgeführt werden müssen, kommen die kleinen ATmega-Mikrocontroller in den Standard-Boards an die Grenzen der Leistungsfähigkeit. Hohe Geschwindigkeiten sind damit nicht mehr möglich. Aber dafür ist man genauer unterwegs.
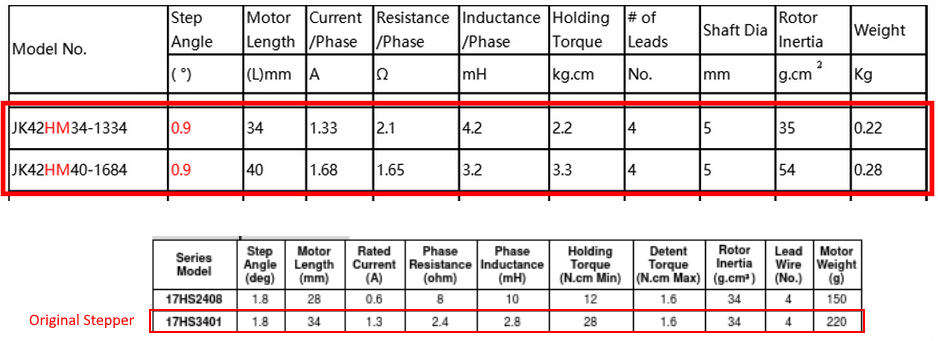
Ich habe Schrittmotoren wie diese gewählt: AliExpress-Link. Eckdaten: Nema 17, 0,9° Schrittauflösung. Hier sollte man noch darauf achten, welche technischen Daten die Motoren haben, damit sie auch ausreichend Kraft besitzen und das Board sie noch antreiben kann. Die Motoren im Bild funktionieren, allerdings habe ich keinen Dauertest gemacht und auch die Referenzspannung am Treiber nicht angepasst. Die originalen Motoren liegen in der Leistung etwas darunter. Man kann auch die JK42HM40-1634 Variante wählen, die ist etwas schwächer als die originalen Motoren.

Berechnungen
Kalibrierung der Achsen
Da keine Mechanik perfekt ist, sind die Werte von 100 oder 200 Schritten pro mm eher theoretische Werte. Man sollte eine Kalibrierung der Achse durchführen, wenn man es perfekt haben will. Dazu schneidet man ein Rechteck mit 100 mm Größe aus und misst das Ergebnis. Daraus lässt sich dann per Dreisatz der Korrekturwert bestimmen. Am einfachsten geht das mit dem Assistenten in LightBurn, wie am Ende der Anleitung zur Einrichtung der Mechanik beschrieben.